Open-Vocabulary and Semantic-Aware Reasoning for Search and Retrieval of Objects in Dynamic and Concealed Spaces
IROS Workshop on Perception and Planning for Mobile Manipulation (2025) (Best Poster Award)
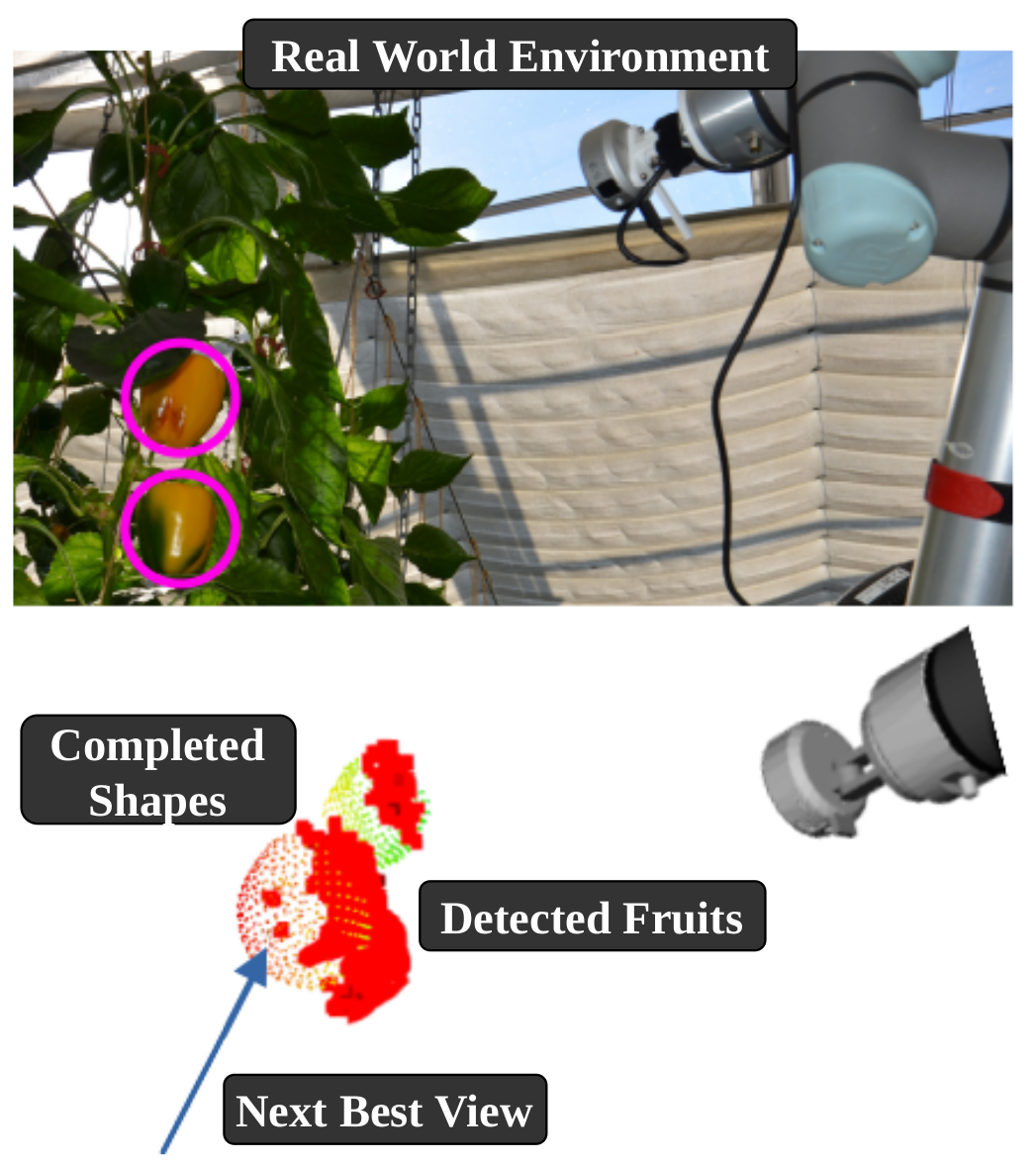
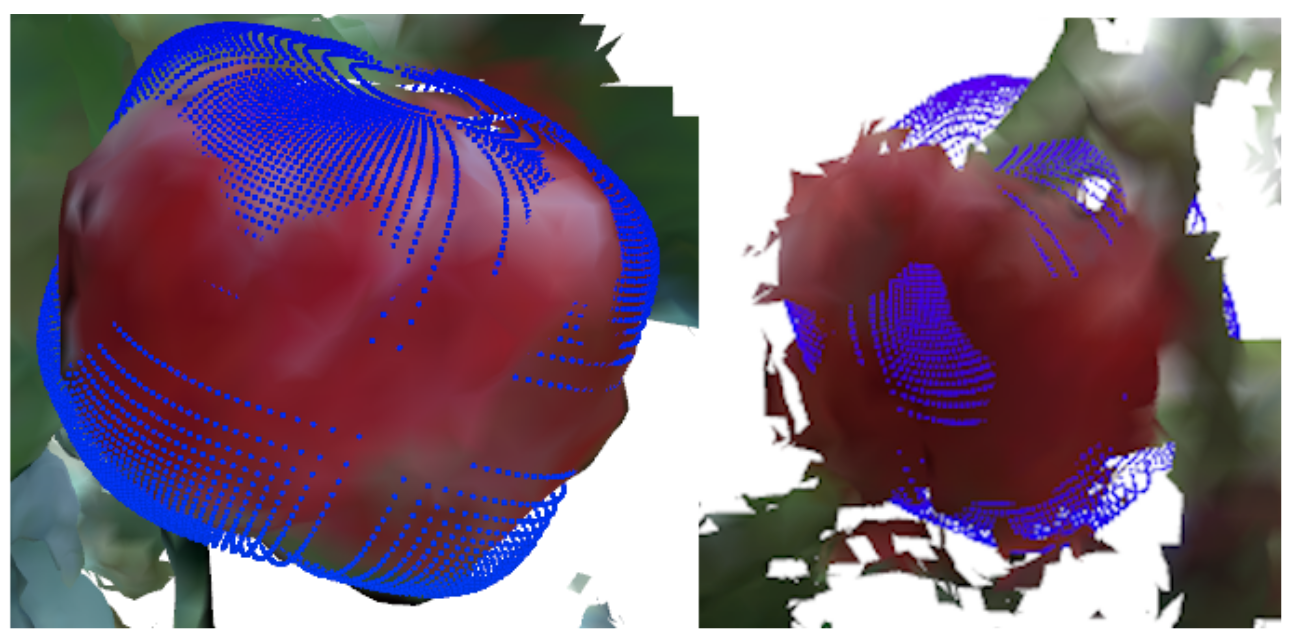
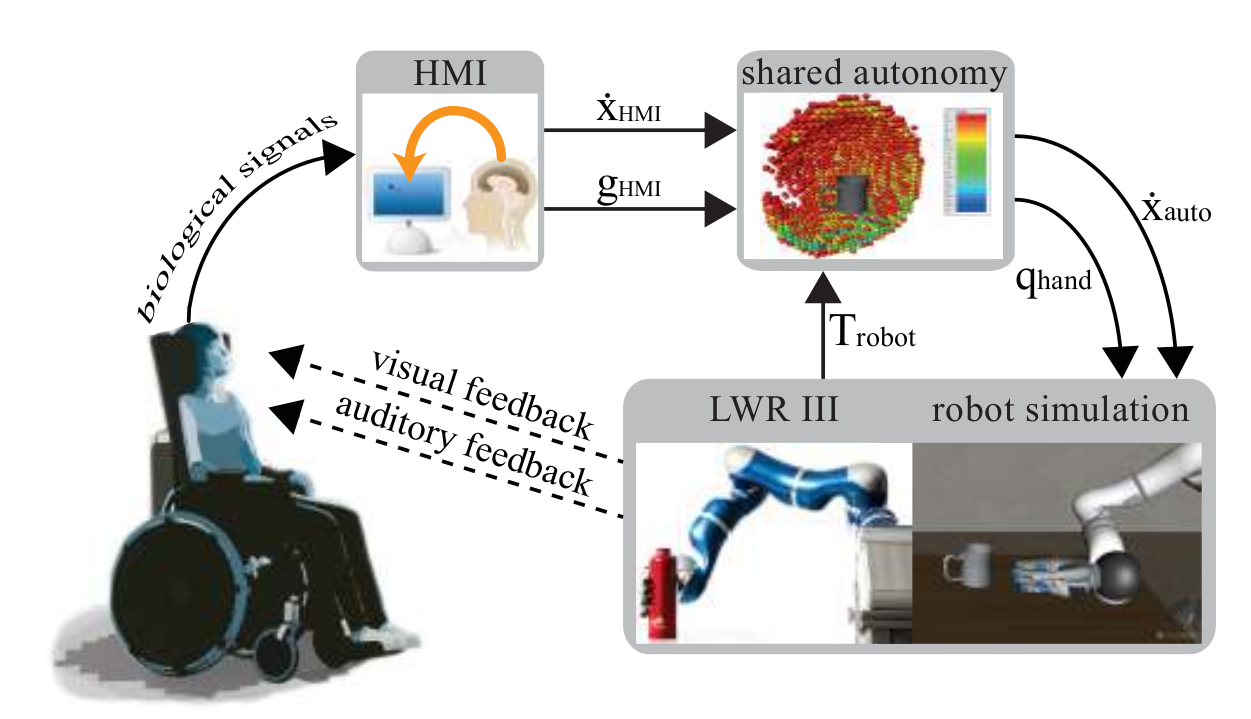
I am a PhD candidate at the University of Bonn, supervised by Prof. Dr. Maren Bennewitz. My research focuses on Active Perception and Mobile Manipulation. I develop algorithms that enable robots to intelligently perceive their environment, specifically for agricultural and domestic applications.

I serve as a reviewer for several top-tier journals and conferences in robotics: